







КАМАЗ представил проект автономного транспортного средства «Одиссей»
Когда 10 лет назад «Группа ГАЗ» решила организовать слёт разработчиков в области автономных транспортных средств, то блогеры со странной ревностью закидали новость своими скепсисами: роботы не смогут заменить шофёра! Но гонка технологий стартовала, и «КАМАЗ» первым объявил приоритет в беспилотных технологиях.
Песочницы и матрёшки автогигантов
Недоверие к автономным транспортным средствам (ТС) в отечестве был призван развеять робототехнический фестиваль «РобоФест-НН», который с 2009 года устраивает «Группа ГАЗ». Щадящие условия вступления в этот политехнический «клуб по интересам» подразумевал наличие любой робототехники в самом разном формате и масштабе. На слёт начали подтягиваться не только вузы и фирмы, но даже коллективы школ и молодёжных секций, что давало нужный толчок к творчеству. В подобных «песочницах» обкатываются вопросы практического применения, которые потом берут на вооружение концерны и ВПК. Подобные конкурсы показывают техническую подкованность и зрелость спонсорского бизнеса, но никаких коммерческих выводов под этим не подразумевают.


2015 год, очередная командировка на полигон в Набережные Челны, из темноты декабрьской хмари «КАМАЗ» неожиданно выкатил полноценный роботрак. Его изготовили в НТЦ на шасси полноприводного грузовика КАМАЗ-5350 и эта пожарно-красная бестия крутила виражи сама! Наш испытатель Даниил Минаев лично прокатился, лишь выбор шасси его смутил – беспилотные внедорожники заказывать могут лишь специфические ведомства вроде МЧС.
Лето 2016-го стало урожайным уже на гражданские сенсации. В Сколково ООО «Бакулин Моторс Групп» в опытном порядке начало обкатку концепта Volgabus MatrЁshka (см. «ГП» № 9, 2016 г.). Следом, к московскому автосалону ММАС-2016 поспела совместная разработка НАМИ и КАМАЗ – беспилотный концепт ШАТЛ-1212 на 12 пассажиров (см. «ГП» № 10, 2016 г.).


На презентации прототипа такси MatrЁshka CityCab к 870-летию Москвы были даже озвучены планы о создании 20-местных беспилотных автобусов. Но вишенкой в торте русских технологий стала премьера Matrёshka M2B6 на салоне IAA-2017 в Франкфурте. И всё же вопрос о массовом и долговременном применении беспилотных технологий не был закрыт.
Но вот оно, в апреле 2018-го в Набережных Челнах объявлено о финальной стадии проекта «Одиссей» – автономного транспортного средства. А в конце мая НТЦ «КАМАЗ» запустило экспериментальный маршрут внутризаводских логистических перевозок.



Автономность c внутренним сгоранием
Маршрут автомобиля замкнутый (отсюда и название «Одиссей») – грузовик всегда возвращается в ту же точку, откуда стартовал. На прессово-рамном заводе (ПРЗ) автомобиль загружается кабинами нового поколения К4 с помощью погрузчика. Затем автомобиль получает команду, самостоятельно отъезжает, без человека в кабине и движется по внутризаводским дорогам, следуя в цех автомобильного завода (АВЗ), паркуется к дебаркадеру и ждёт разгрузки. После разгрузки автомобиль направляется назад, на ПРЗ. В таком челночном режиме он перемещается по одному маршруту в течение рабочего дня. Для дистанционного управления и контроля за движением создан диспетчерский пост, который обслуживает один человек.
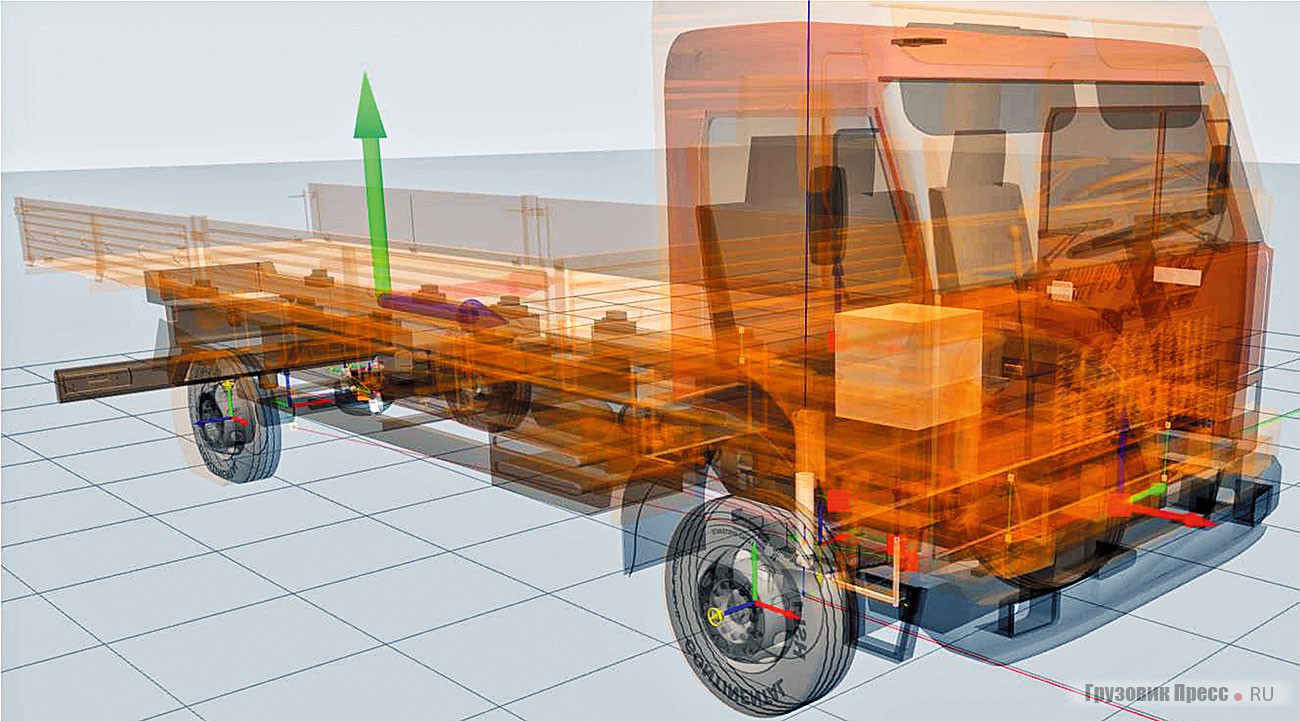
Первый «Одиссей» собран на длиннобазном среднетоннажном грузовике КАМАЗ-43083. Парадокс, достойный лучших произведений дизельпанка, – мы видим не передовой электромобиль, заряжаемый от розетки, а грузовик с двигателем внутреннего сгорания!
Примерное поведение
Техническое задание было сформулировано с юридической лаконичностью: «Разработка системы автопилотируемых транспортных средств на закрытых территориях для перевозки грузов». После этого работа разделилась на четыре ветви: конструкторскую, аппаратную, логистическую и программную. Начнём с конструкторской.
Выбор шасси КАМАЗ-43083 обусловлен тем, что оно более всего по габаритам, размеру кузова, грузоподъёмности и мощностным параметрам двигателя подходит для пилотного проекта транспортировки кабин из ПРЗ на АВЗ.
Требования системщиков к элементной базе были лаконичны: система должна быть электросовместимой с системой автомобиля, обладать виброзащитой и быть автомобильного исполнения. Данные от автомобиля компьютер должен получать по внутренней шине CAN в режиме реального времени.

Работа над роботом
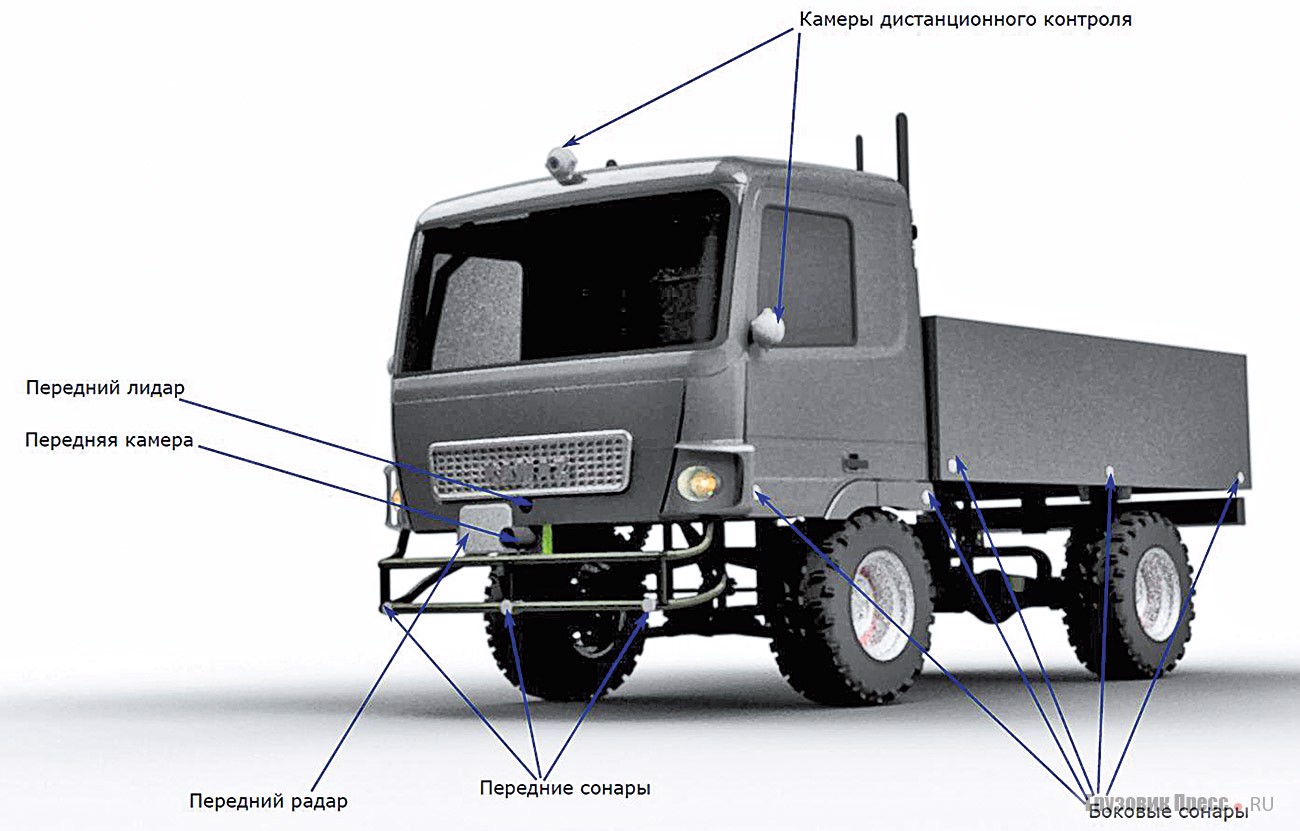
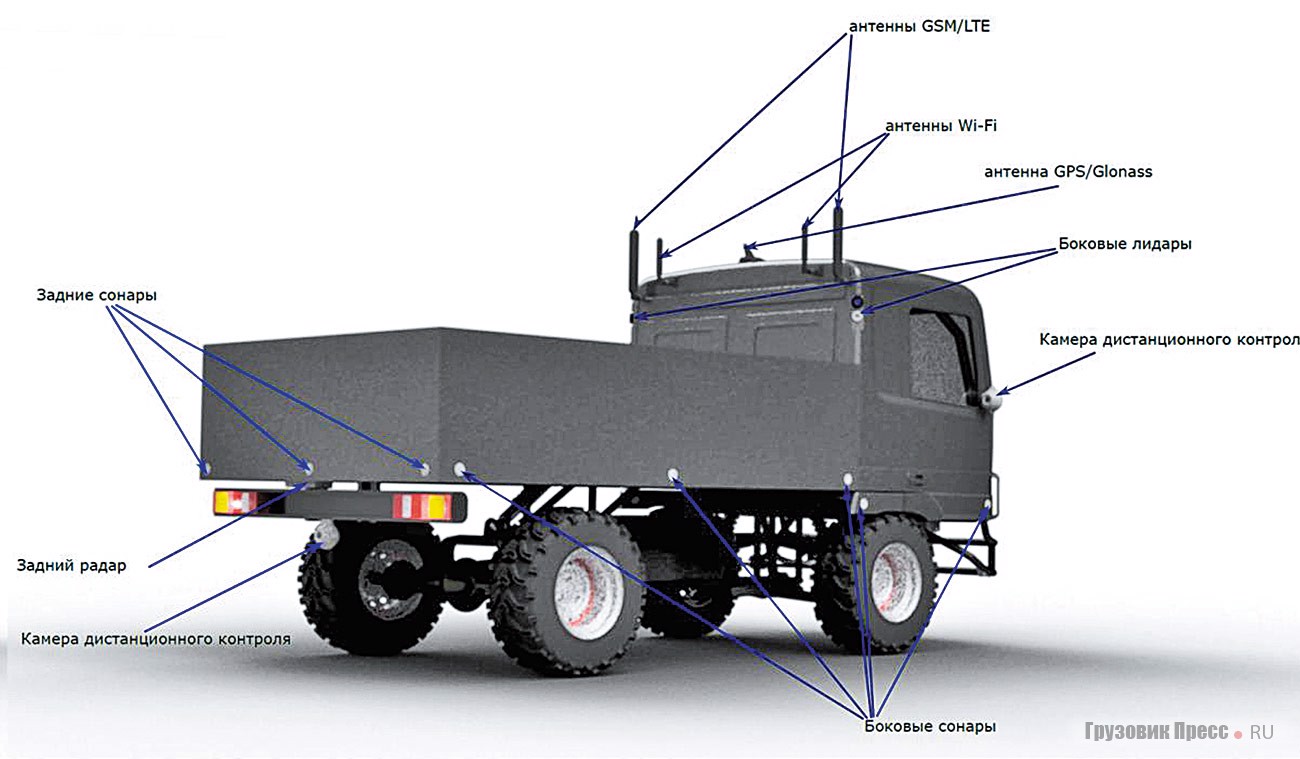
Наиболее важным при выборе ТС стала возможность адаптации механизмов машины для работы в беспилотном режиме. Для этого в конструкции базового автомобиля ГУР был заменён на ЭГУР, также установлена система сенсоров.
Аппарат машины оснащён сразу четырьмя типами сенсоров: «глаза» и другие «органы чувств» грузовику заменяют видеокамеры, радары, лидары (лазерные дальномеры) и сонары. У авторобота высокоточная навигация (с погрешностью не более 3–5 см) и система связи: промышленный Wi-Fi, 4G и специальный УКВ-диапазон на случай, если заглушены другие каналы связи, т. е. экстренный канал. Все данные с датчиков поступают в главный мозг машины – компьютер, в главном процессоре которого происходит обсчёт входящей информации о параметрах движения. Он расположен на спальной полке кабины.
Благодаря этому аппаратному оснащению грузовик в состоянии выбрать маршрут, опираясь на данные навигации и машинного зрения, распознавать и объезжать препятствия, а также следовать за другим автомобилем с соблюдением дистанции. Исходя из этого и будет приниматься решение, как машине себя вести и как правильно выполнять задание.

Как заправляется робот?
Резонный вопрос логистиков, которые уже всё поняли про маршрут, но хотят понять, как робот узнаёт, что ему пора заправляться и кто будет тыкать в заливную горловину топливного бака заправочный пистолет?
Оператору-контролёру на компьютер через канал Wi-Fi или 3G или 4G (тут можно выбирать наиболее устойчивую связь) постоянно приходит информация о состоянии узлов машины в том числе и об уровне топлива. И если такая машина «проголодается», то оператор дистанционно отправит ТС на дозаправку. За обслуживание и подготовку к рейсу отвечает водитель-испытатель. Но движение машина будет осуществлять без пилота. Максимум, что она может, – покатать испытателя.

На перевозке кабин из ПРЗ на АВЗ на первом этапе будут задействованы 1–2 беспилотные машины. Для обслуживания всего маршрута потребуется только один оператор-контролёр, да и того, возможно, потребуется чем-то тормошить целую смену, чтобы он не уснул. Для расширения и закрепления опыта в 2019–2021 гг. будут выпущены пилотные партии до 5 машин для внутрилогистических перевозок, по внутренней территории ПАО «КАМАЗ».
Усложнение до искусственного интеллекта
Задачи при разработке ПО были оговорены с конструкторами заранее, поэтому изменения в ТЗ вносить не пришлось. На этапе создания техзадания была оговорена подробная архитектура всей системы как аппаратного, так и программного обеспечения, написанного на языках C++ и Python.




При написании техзадания для ТС ограничений не было, но пришлось столкнуться с спецификой IT-индустрии. Так, при разработке ПО выяснилось, что производители сенсорики, навигации и систем связи завышают свои технические характеристики. Это в итоге влечёт за собой появление проблем на этапе тестирования. В процессе же разработки приходится писать ПО с запасом на погрешность оборудования.
В работе программистов не всё было гладко, специалисты столкнулись с рядом усложнений на которые не рассчитывали. Например, пришлось улучшать машинное зрение и подключить частичный искусственный интеллект для управления и принятия решения и, как уже было сказано, внедрить дублирование системы связи и системы принятия решений.
Компьютер автомобиля разработан силами специалистов Научно-технического центра «КАМАЗа» совместно с КФУ – Казанским федеральным университетом. Штат разработчиков включает две команды. Первая, численностью 40 человек, находится в Казани, а вторая команда из 20 человек базируется в Набережных Челнах в НТЦ ПАО «КАМАЗ».
Ты куда, Одиссей, от жены, от детей?
Чтобы научить машину вести себя «безопасно и осознанно», потребовался процесс обучения, занявший около 6 месяцев. Для этого создан контент виртуального полигона высокой сложности с графической моделью улиц города.
Компания Cognitive Technologies, занимающаяся созданием искусственного интеллекта для беспилотных КАМАЗов разработала сценарии поведения автомобиля в аварийных ситуациях. В проект включены электробус, который дебютировал 12 июня в Казани, и перонный вариант КАМАЗ-НАМИ ШАТЛ, который запустят в аэропорту Бегишево для VIP-клиентов после проведения Чемпионата мира по футболу FIFA-2018.
Так, интернет-пользователям предложили проголосовать, что должен сделать авторобот в ситуации неизбежного выбора: сбить пешехода (собаку) или съехать в кювет, рискнув жизнью пассажиров?


Предположим, беспилотный автомобиль движется со скоростью 80 км / ч. Условие предусматривает внезапное появление на дороге перед ним нескольких человек, и экстренное торможение в данной ситуации бесполезно. Продолжить движение и совершить наезд на людей, выехать на встречную полосу через две сплошных или съехать в кювет, понимая, что это приведёт к неминуемым повреждениям автомобиля?
Цинизм необходим. В данном вопросе каждый ребёнок является пешеходом, а другой пассажиром и гибель каждого нужно предотвратить. Клубок проблем ограничивается не столько провокационностью вопроса, сколько желанием разрешить подобные ситуации раз и навсегда: никто не застрахован быть сбитым на пешеходном переходе на зелёном сигнале светофора, но риск можно уменьшить. В конечном итоге роботизированный автомобиль на мобильник не отвлекается, за рулём не засыпает, водку не пьёт, инфарктом не страдает. И если робот избавлен от психологической дилеммы, то он должен превысить нормы этического выбора, присущего человеку, и ограничить хотя бы скорость. Проработка программных методов, позволяющая заложить ограничение скорости на определённых участках позволяет снизить риски. Это задача достойная трёх законов робототехники, сформулированных Айзеком Азимовым в рассказе «Хоровод» ещё в 1942 году, и мета-теста Тьюринга, описанного в 1950 году в статье «Вычислительные машины и разум» для философского журнала Mind.

Закон роботов
Результаты опроса компания планирует использовать как основной критерий при определении наиболее вероятной жертвы в случае возможного ДТП. Тут возникает множество юридических коллизий, которые уже являются прецедентами.
Президент группы компаний Cognitive Technologies Ольга Ускова в интервью «Вести КАМАЗА» констатитрует безапелляционный прогноз: «Для беспилотных автомобилей уже сегодня необходимо создать соответствующую нормативную базу – своего рода моральный кодекс, который регламентирует поведение искусственного интеллекта беспилотного автомобиля в том числе и в критических ситуациях, которые, к сожалению, с неизбежностью возникают на дороге».
Задачи не столько назревают, сколько готовы к исполнению. По словам программистов, «ПО для технологического транспорта отличается от применяемого на дорогах общего пользования колоссально, так как на закрытых территориях система машинного зрения идёт на втором месте, на первом стоит точное позиционирование, и это влияет на выбор приоритета в принятии решений. На дорогах общего пользования уклон делается на машинное зрение».
Следует отметить, что автороботов для дорог общего пользования пока не существует, только опытные прототипы. Меньший набор сенсорики для дорог общего пользования снижает уровень автопилотирования, чем у автороботов для закрытых территорий. Это обусловливается тем, что на закрытых территориях нет законодательных ограничений, а на дорогах общего пользования они имеются. Водитель на дороге общего пользования должен быть всегда за рулём и следить за ситуацией.
В перспективе при массовой эксплуатации возникнут и более сложные проблемы: система компьютера может зависнуть, программа быть взломанной, а управление перехвачено, и юристы всего мира готовятся к такому повороту событий.

Дела грядущие
Сейчас рассматривается вариант поставки автомобилей КАМАЗ с установленным ПО для других заводов, поскольку в беспилотный, при определённой калибровке существующего ПО, можно превратить почти любую машину из всей линейки «КАМАЗ». Машину возможно адаптировать под другой маршрут, поскольку система создавалась как унифицированная и её можно применить в любом другом проекте вне зависимости от области применения.
Серийный выпуск беспилотников в планах завода рассматривается лишь после 2022 г., а спрос на такие машины существует уже сейчас. Например, в металлургии на рудных дворах доменных цехов постоянно задействовано на отрезке в 0,5 км по 4–5 машин, и в последнее время им пытаются найти достойную замену.
Сергей Назаренко, главный конструктор инновационных автомобилей Научно-технического центра ПАО «КАМАЗ»:
– У каждого авторобота предусмотрен режим ручного дистанционного управления через джойстик или руль, как в компьютерной игре. Этот режим будет запасным на случай экстренной ситуации. Базовый режим работы – автономный режим, с мониторингом со стороны оператора. Если в пути случилось что-то нестандартное, непредусмотренное, автомобиль останавливается и ждёт команды оператора. Для этого создаётся система мониторинга и управления автороботами.


